| A
Neuromimetic vision system Any
artificial agent
acting in a real-world scenario should perform the analysis and
interpretation of visual motion in a fast and reliable way. This task
is effectively solved by the primate visual system, specifically in the
dorsal cortical pathway, i.e. the ``action stream’’.
The dorsal pathway is organized in a hierarchical structure of layers that process the visual signal to extract simple image features that become more informative and complex in higher layers. In this work, to fully exploit such an effective hierarchical approach adopted by the mammals’ visual system, we propose a bio-inspired vision system that mimics the first stages of the dorsal cortical pathway, i.e. the cortical motion pathway (namely V1-MT-MST). In particular, we have considered the following processing stages:
|
|
If you use our datasets, we request that you cite the following paper:
F. Solari, M. Chessa, S.P. Sabatini. An integrated neuromimetic architecture for direct motion interpretation in the log-polar domain. Computer Vision and Image Understanding, 2014. [doi]
Datasets
 |
Synthetic sequence:
|
 |
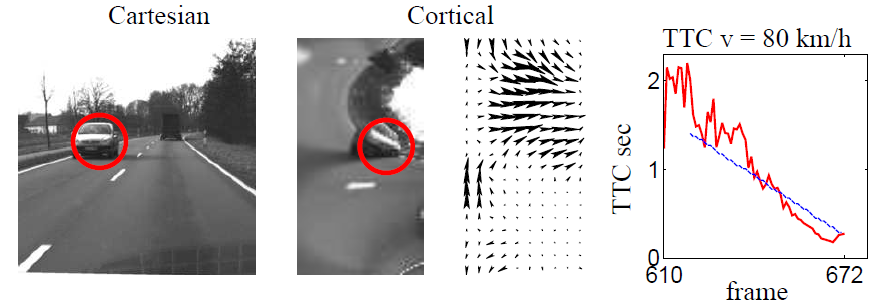
"Trailer Follow"
sequence:
|
 |
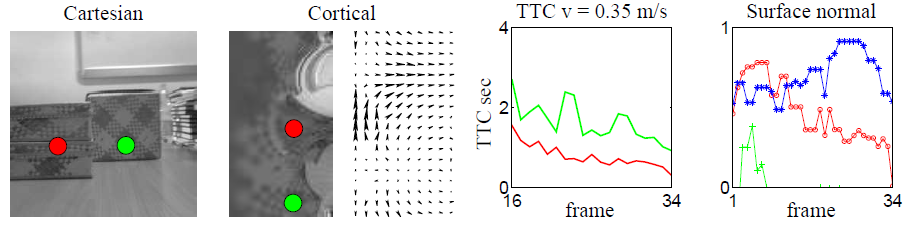
Frontoparallel
obstacles sequence:
|
 |
Slanted obstacles
sequence:
|
For further information feel free to contact Fabio Solari or Manuela Chessa