A Portable Bio-inspired Architecture
for
Efficient Robotic Vergence Control
This project provides a software module for the control of the binocular coordination of a robotic stereo head,
based on a bio-inspired algorithm. The algorithm works on the top of a distributed representation of binocular disparity supplied
by a population of binocular energy-model neural units.
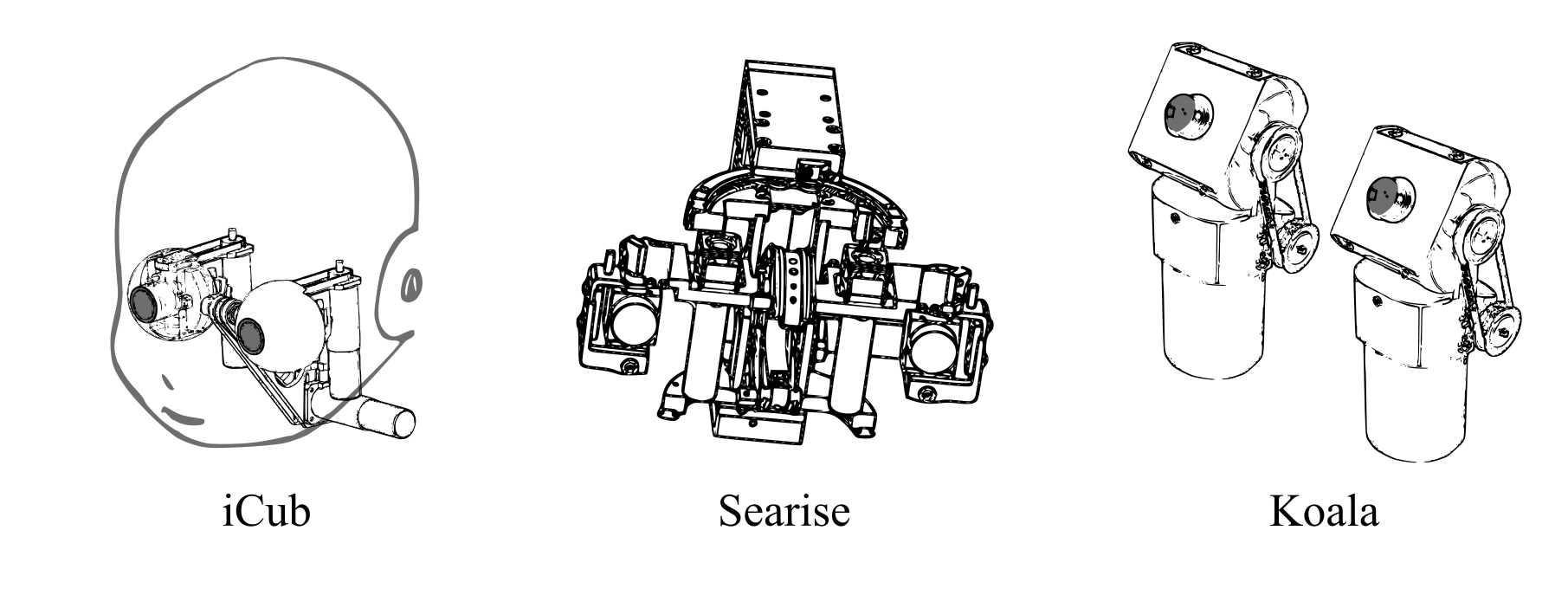
The project allows a robust control and adaptive binocular coordination for different robot stereo platforms.
.
Reference Publication:
Gibaldi, A., Vanegas, M., Canessa, A., & Sabatini, S. P. (2017).
A portable bio-inspired architecture for efficient robotic vergence control.
International Journal of Computer Vision, 121(2), 281-302., 4.
Gibaldi, A., Canessa, A., Chessa, M., Sabatini, S. P., & Solari, F. (2011, October).
A neuromorphic control module for real-time vergence eye movements on the iCub robot head.
In Humanoid Robots (Humanoids), 2011 11th IEEE-RAS International Conference on (pp. 543-550). IEEE. , 4.
|