|
|
manipulate objects, use tools?

|
to share attention with humans, and
to ignore irrelevant detail?
|
language,perception and action
to facilitate cooperation with humans?

|
acquire, store and retrieve knowledge
and improve its capabilities by learning?
|
Cognitive Interaction at the crossroads
of several disciplines:

|
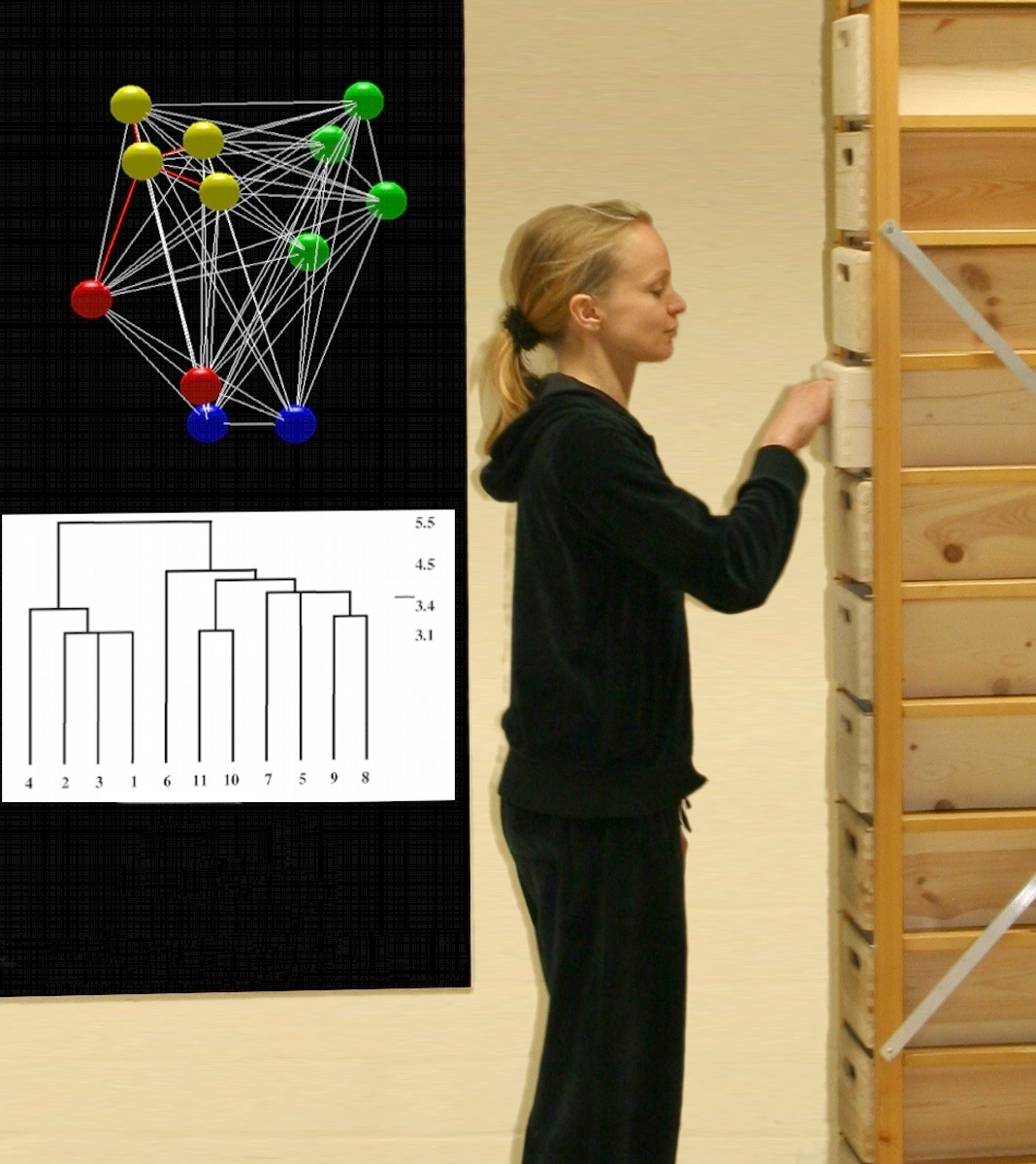
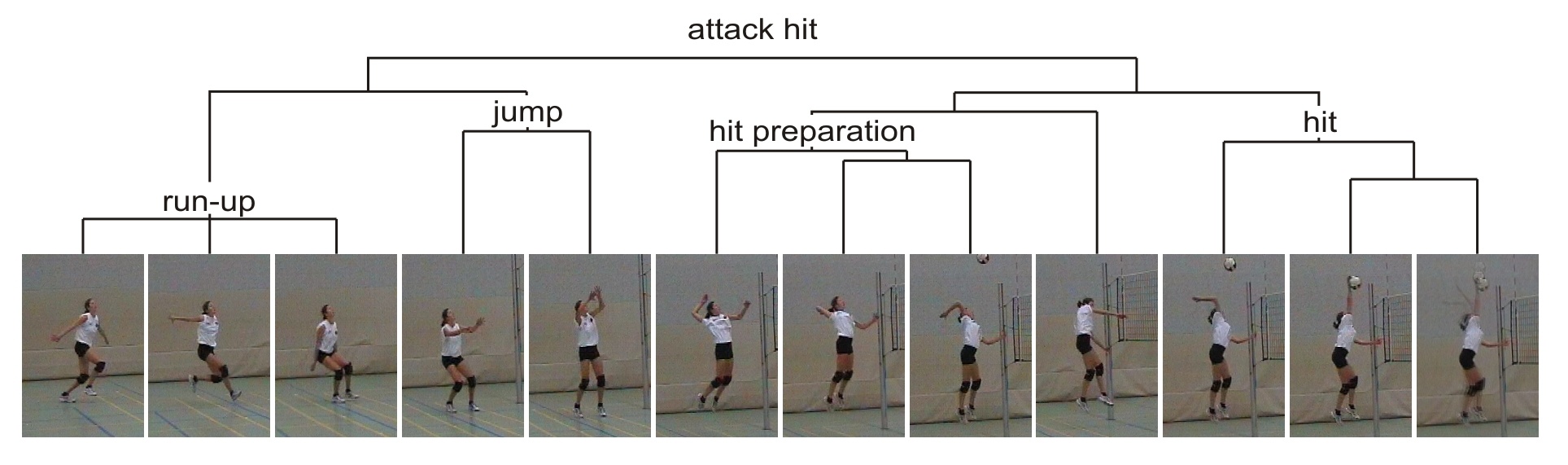
Organization of Memory for Actions
|
|
|
Bielefeld-based CoR-Lab (Cognition & Robotics Lab) closely cooperating with CITEC Cluster
|

|
|
|
|

|
|
|

|
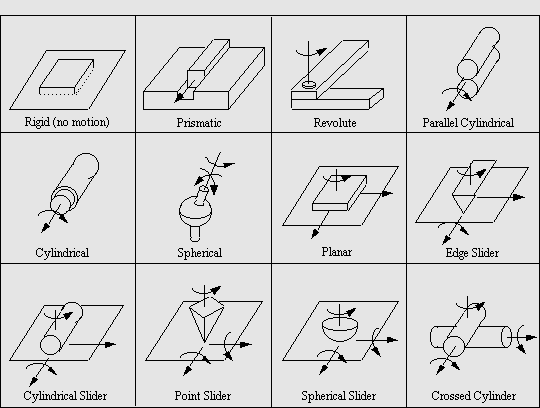
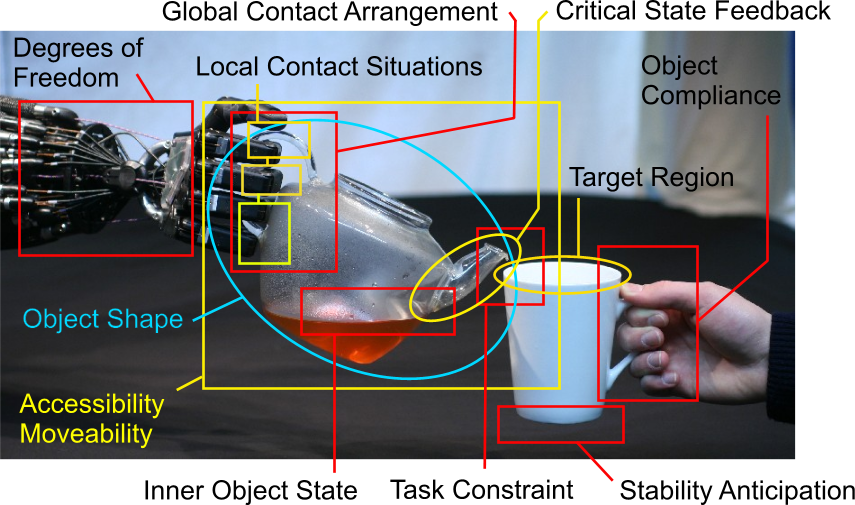
Cognitive agents need to understand many aspects of contact:

|
|
static, slipping, rolling
fixed, rigid, soft, ...
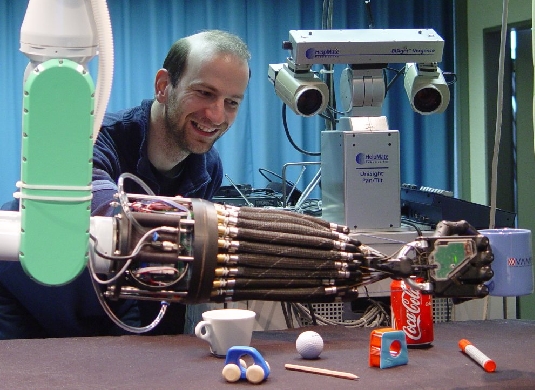
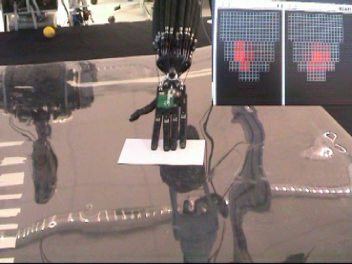
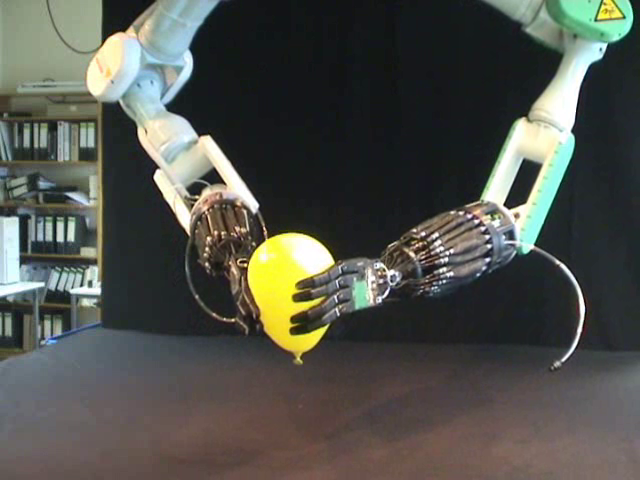
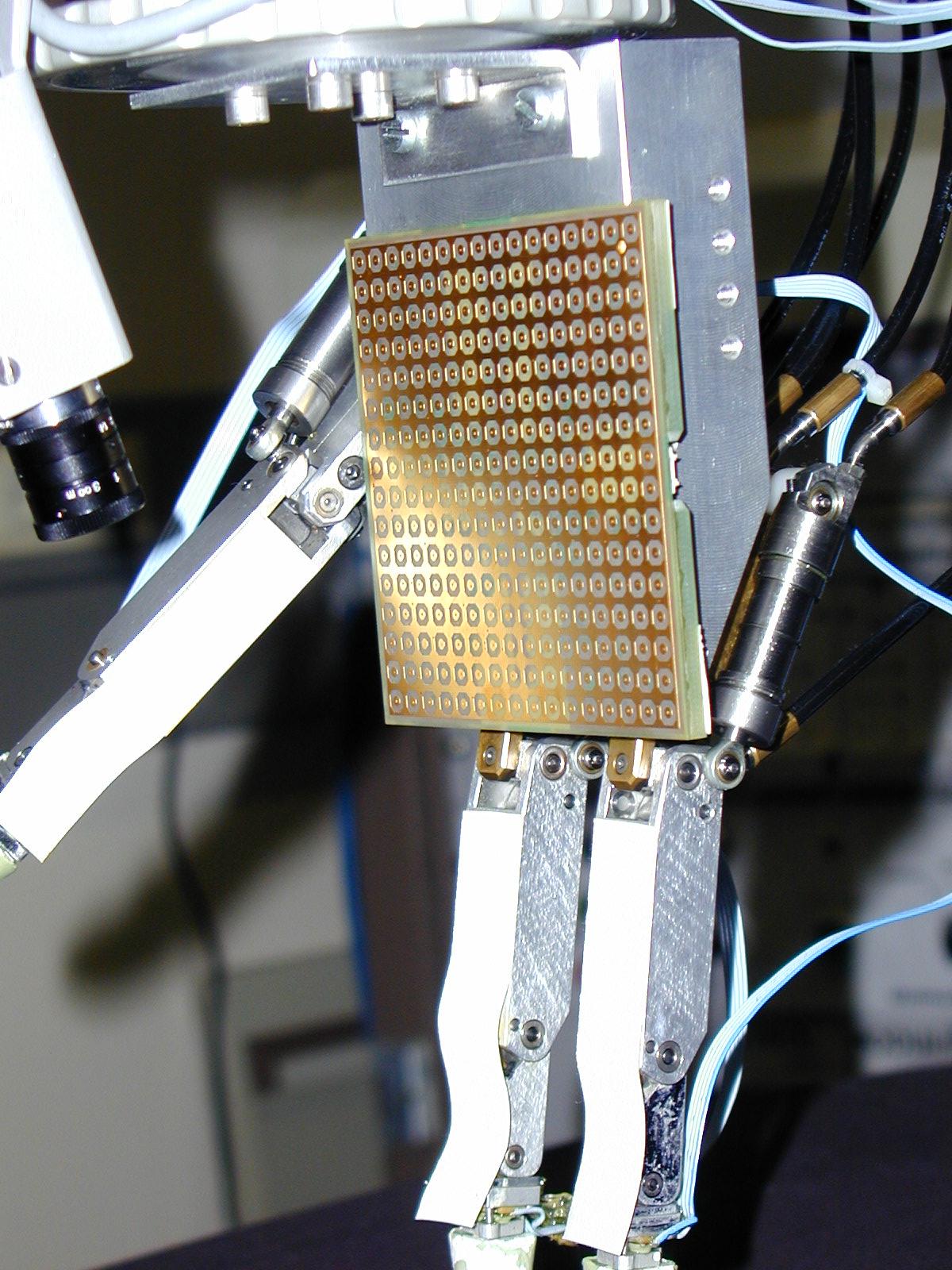
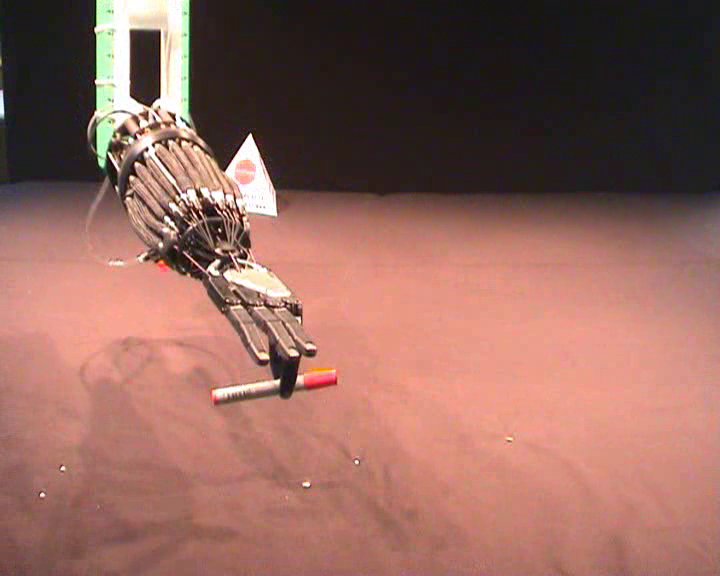
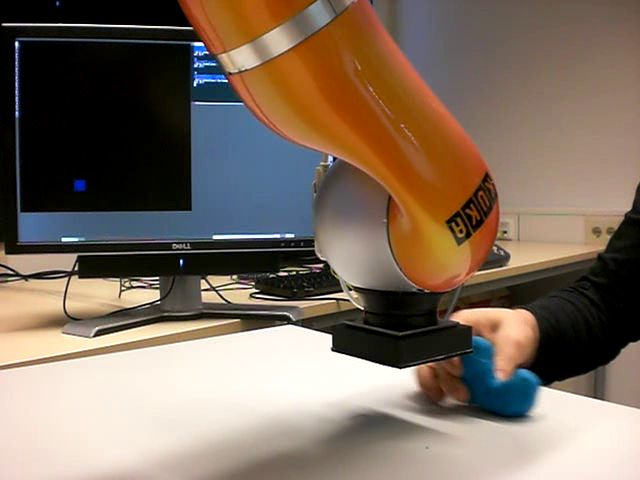
7 DOF PA-10 robot arm
|
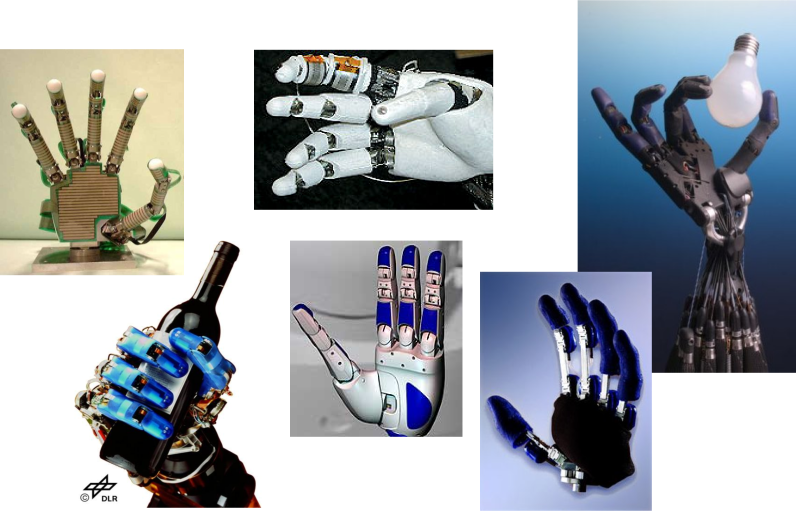
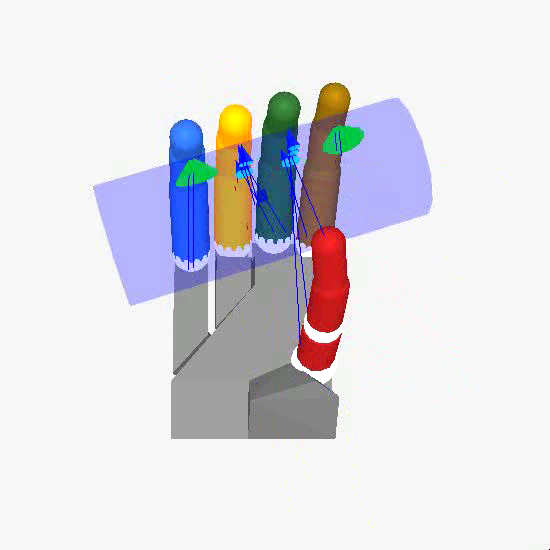
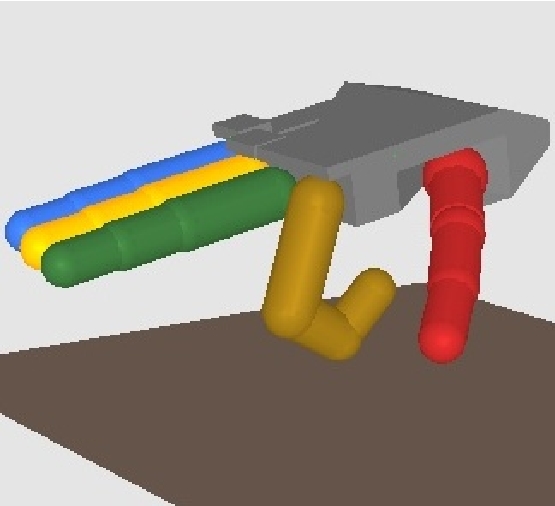
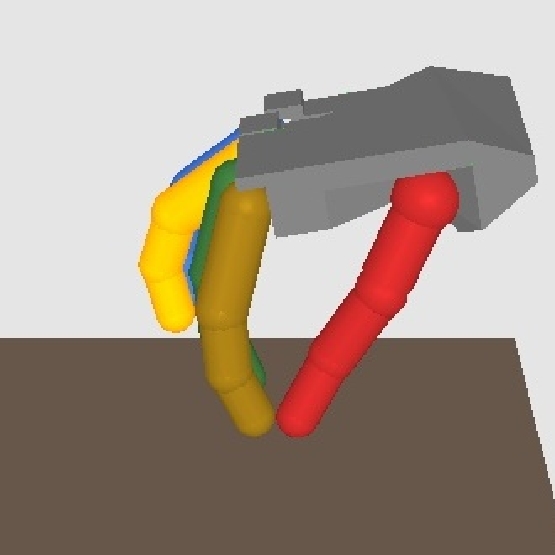
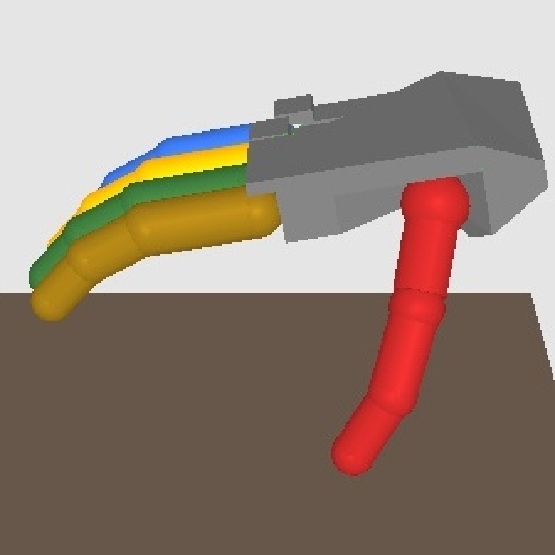
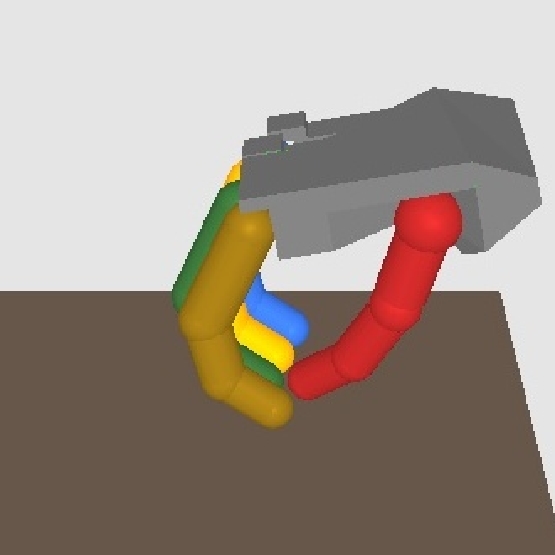
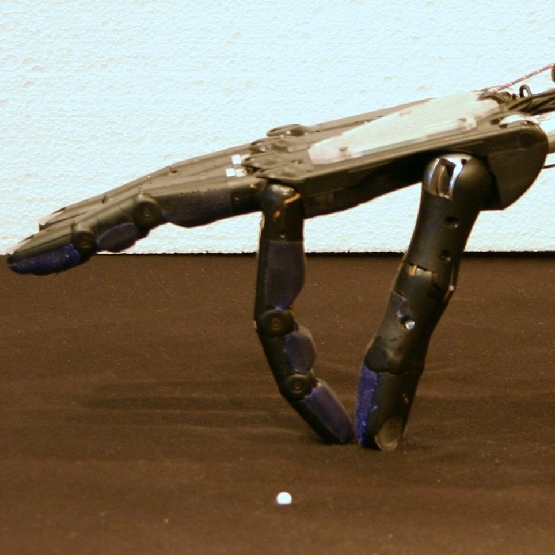
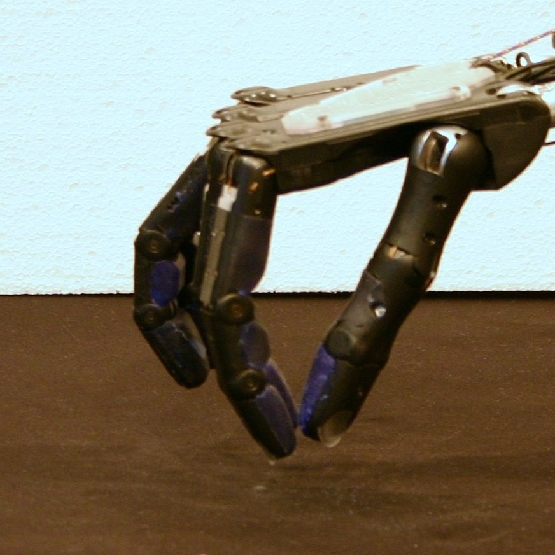
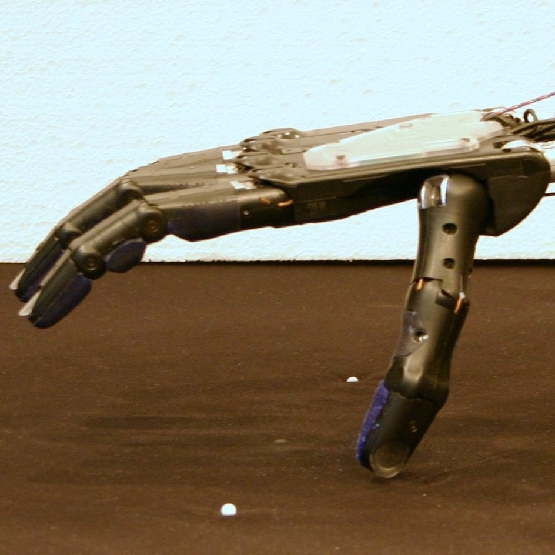
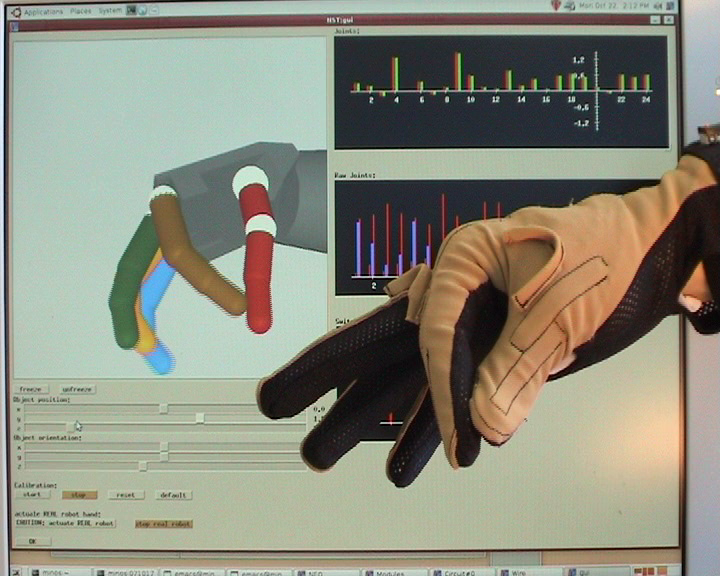
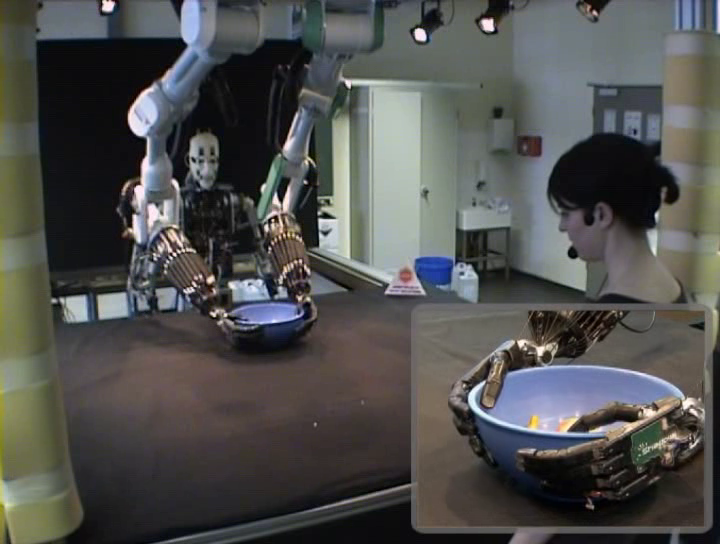
dextrous robot hand 20 DOFs
|
pneumatic muscles pressure pulse-driven inherent compliance
|
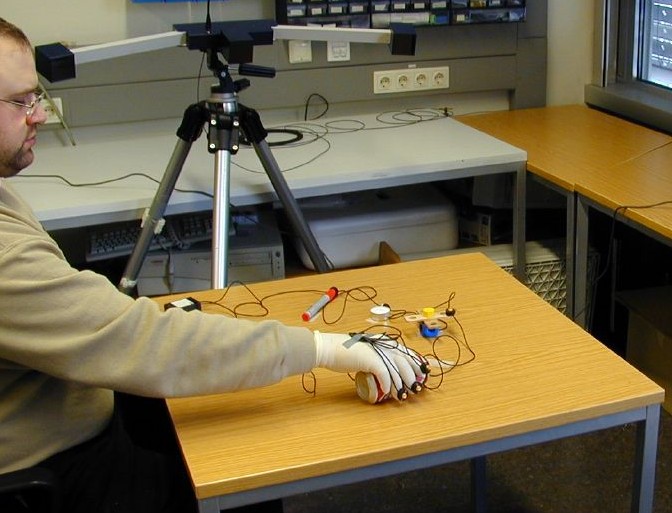
Grasping Lab: hand-arm setup |
|
|
|

|

|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
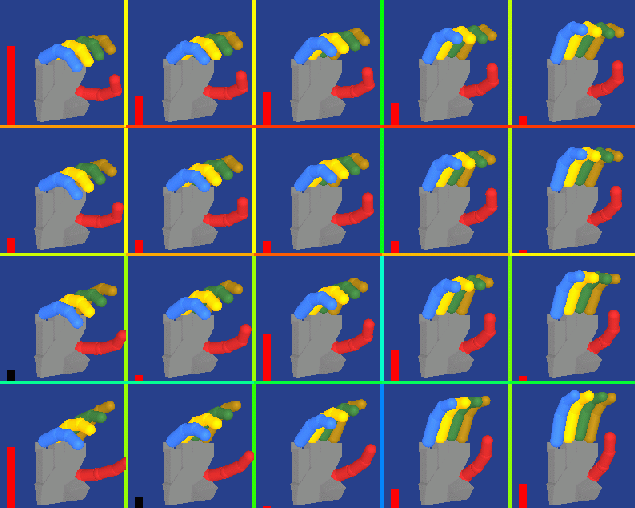
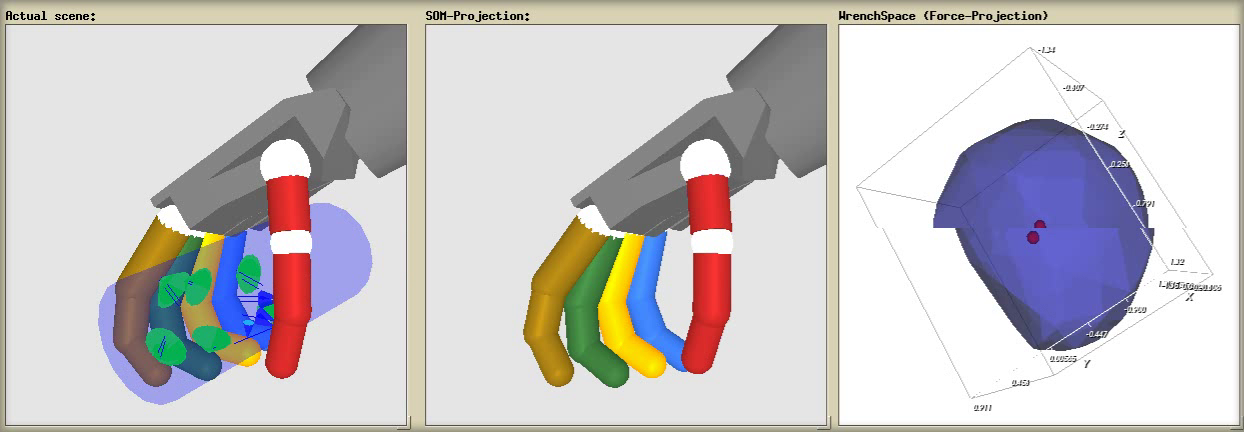
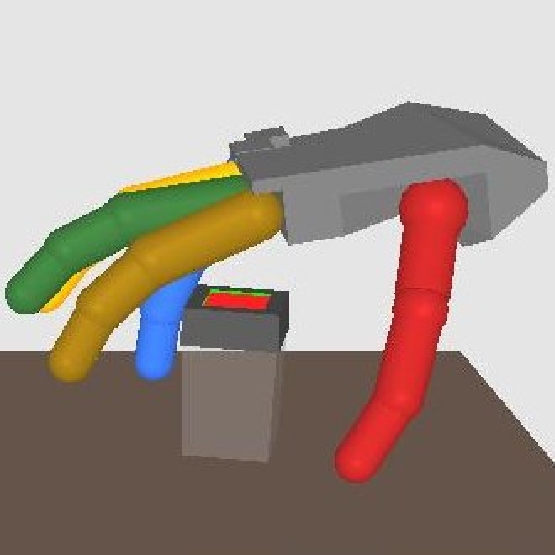
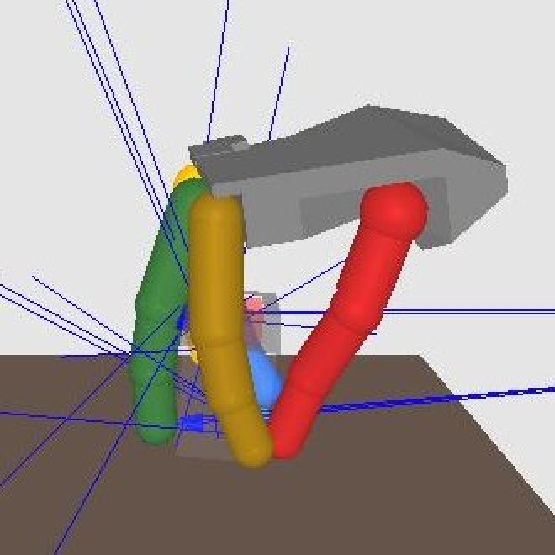
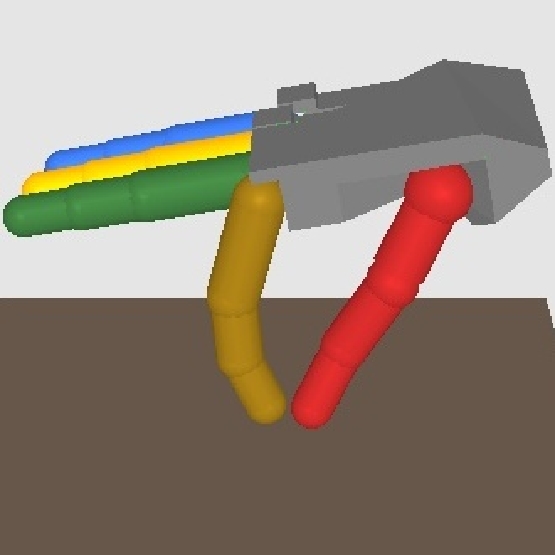
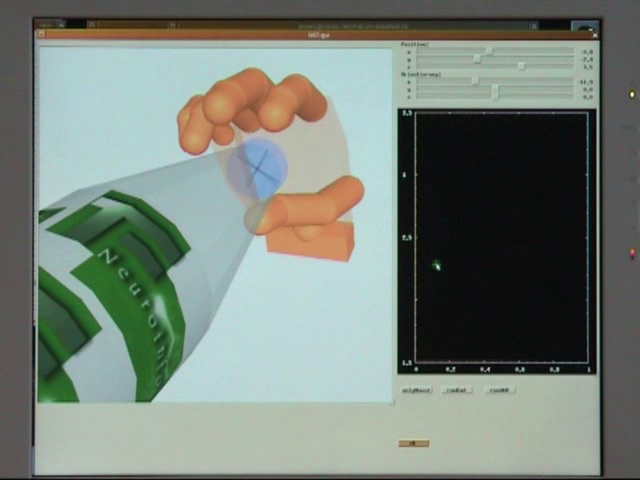
finger contacts
|
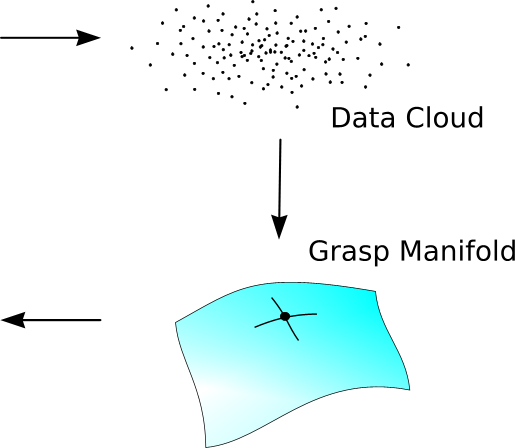
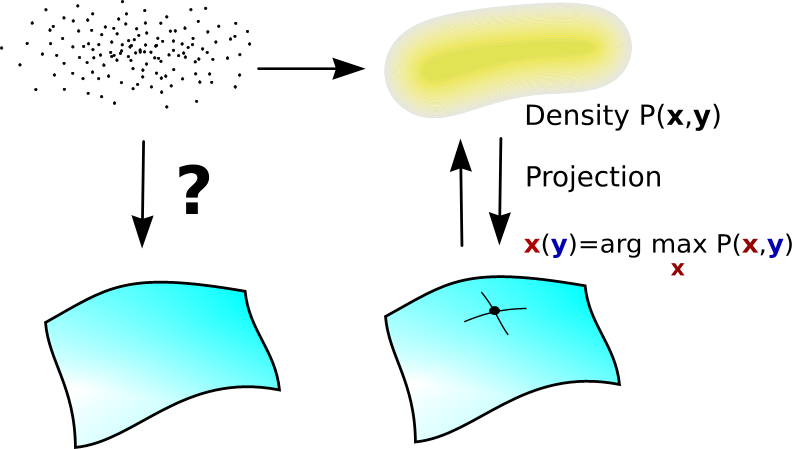
grasp stability
|
finger-controllers
|
|
|
|
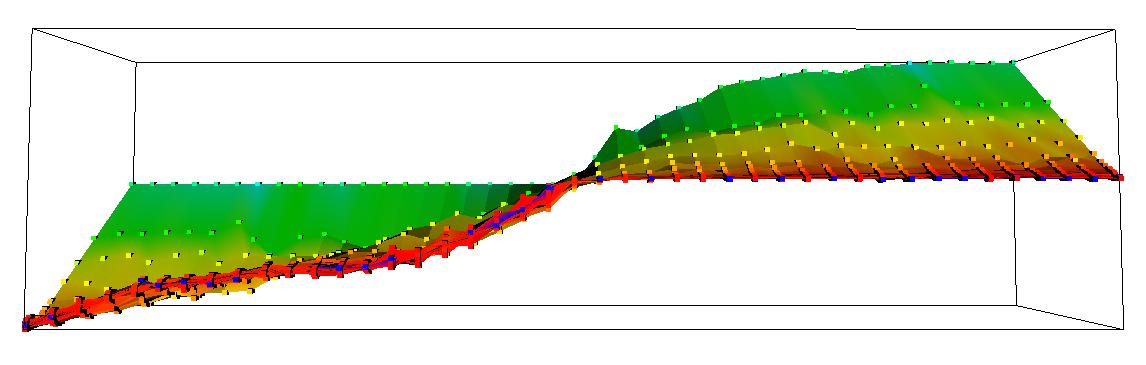
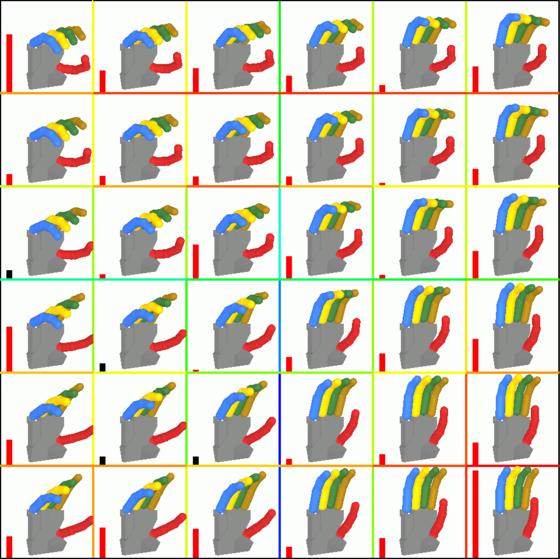
grasp geometry
|
|
|
|
|
|
|
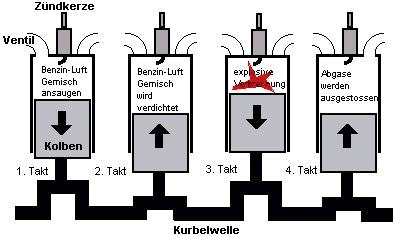
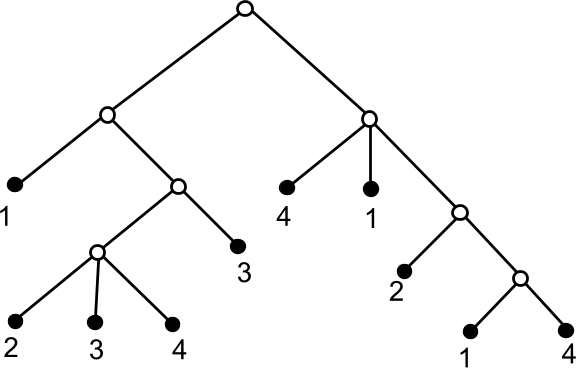
Example: A grasping "clockwork"
|
more robustly (but may be harder to conceptualize and decompose)

| |
| |
| |
| |
| |
| |
| |
| |
| |

| |
| |
| |

| |
|

|
|
|
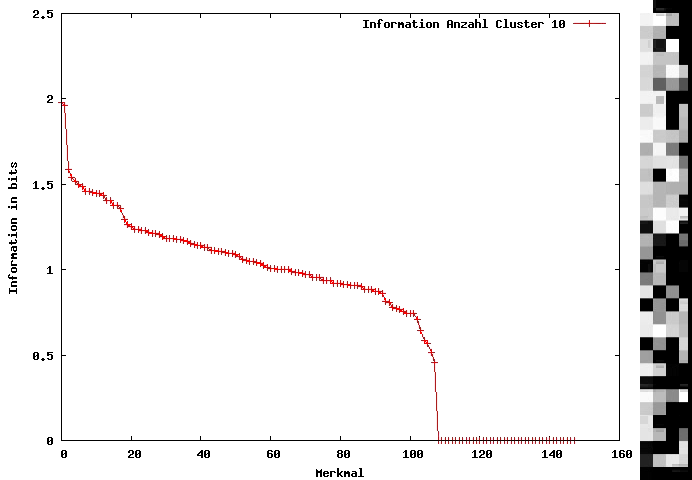
10 trials per object & grasp (840 trials total)
|

|

|

|

|

|

|
Many influence factors depend on prior knowledge
|
|
|
|
|

|

|
|
|
|
|
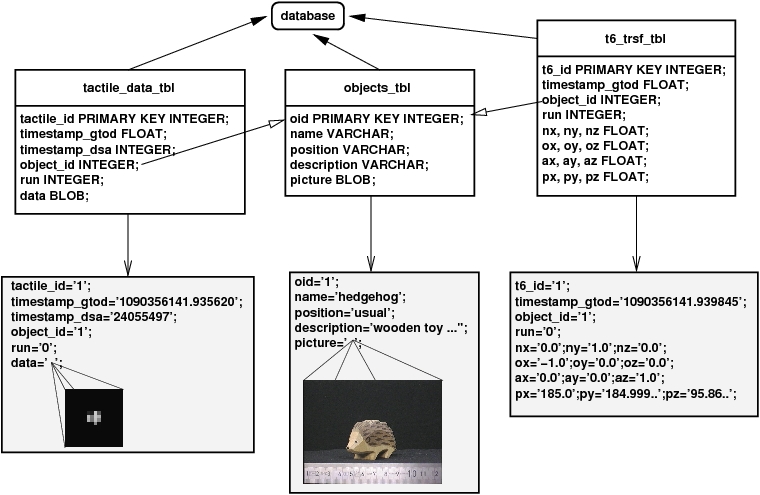
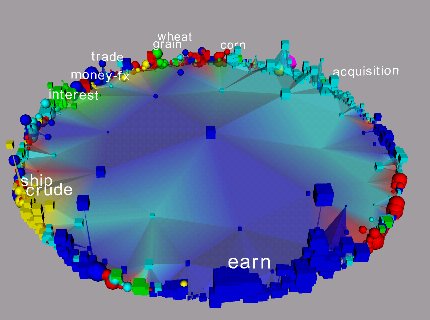
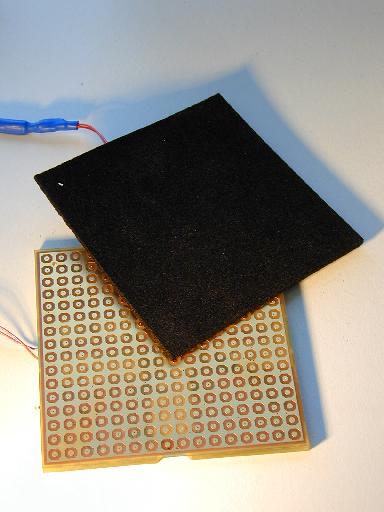
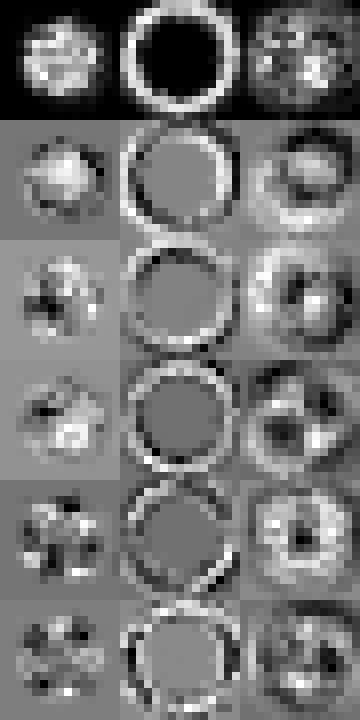
Idea: create "haptic image database" for studying object identification based on (robot) touch sensation
|
|
|
|
|
|
|
|
|
Dealing with deformable objects I:
Shaping clay from haptic feedback
|
Dealing with deformable objects II:
Manipulating paper
|
|
|
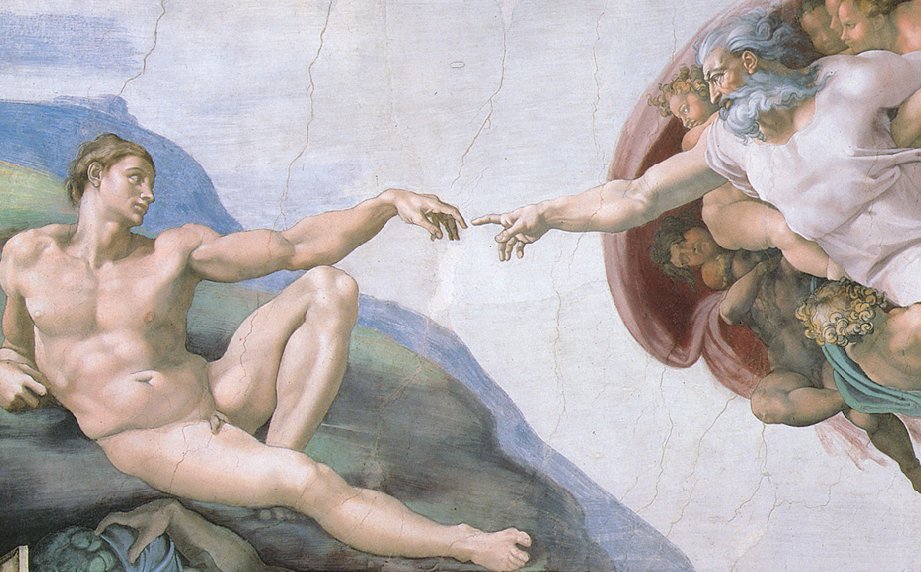
Sprache handelt vom Erfassen von Begriffen und Bedeutung
Our hands embody a large
Vocabulary of capabilities:
|
|
|
|